• Plně automatická jízda na parkoviště (Valet Parking)
• Automatické nabíjení elektromobilů
• V-Charge klade nepatrné požadavky na infrastrukturu parkovacích budov
• Inteligentní forma pohodlného parkování (Valet Parking)
Volkswagen „V-Charge“
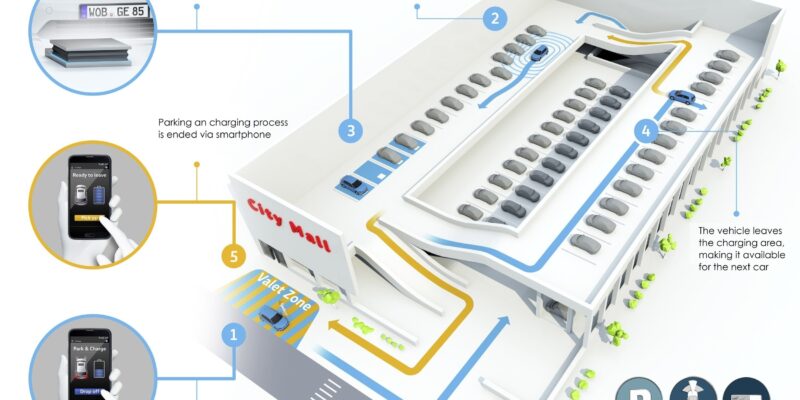
Volkswagen AG usiluje o vedoucí postavení v oblasti automatizované jízdy. Výhledem do blízké budoucnosti automatizovaného parkování je „V-Charge“, výzkumný projekt EU, v jehož rámci vyvíjí šest mezinárodních partnerů společně nové technologie. Středem pozornosti je automatizace procesu vyhledání parkovacího místa a nabíjení elektromobilů. Vozidlo přitom nejen automaticky vyhledá volné parkovací místo, ale také nalezne volné stanoviště s nabíjecí infrastrukturou, která zajistí nabití akumulátoru vozidla indukční metodou. Po ukončení procesu nabíjení uvolní vůz automaticky nabíjecí stanoviště jinému elektromobilu a vyhledá si konvenční parkovací místo. „V-Charge“ znamená „Valet Charge“ a ukazuje cestu do budoucnosti inteligentního automatizovaného parkování.
Především v USA je hitem pohodlné parkování (Valet Parking), kdy je vůz zaparkován obsluhou navštíveného podniku a při odchodu je vozidlo obsluhou opět přistaveno. Časově náročné hledání parkovacího místa tím odpadá. Projekt V-Charge se nechal touto myšlenkou inspirovat a jako cíl vývoje stanovil plně automatizované vyhledání parkovacího místa („Valet Parking“) v definovaných odstavných zónách, například v parkovacích budovách.
Scénářů, které ukazují přednosti konceptu V-Charge, je mnoho. Jeden praktický příklad z každodenního života: Dojíždějící zaměstnanec zjistí, že pravděpodobně přijede pozdě a zmešká důležitou poradu ve své firmě. Díky funkci V-Charge má možnost zastavit přímo před vchodem, vystoupit a prostřednictvím příslušné aplikace v chytrém telefonu vytvořit spojení se svým vozem. Do plně automatizovaného vozidla je přenesena digitální mapa, podle níž vůz automaticky dojede k volnému parkovacímu místu v parkovacím areálu nebo parkovací budově. Pokud se jedná o elektromobil, upřednostní systém odstavnou plochu s automatizovaným nabíjecím zařízením. Chodci, cyklisté a ostatní vozidla jsou rozpoznávány prostřednictvím integrovaných kamer a ultrazvukových senzorů. Vozidlo se díky tomu může pohybovat v tzv. „smíšeném provozu“. Zvolený parkovací areál nemusí být ani uzavřený, ani není vyžadováno náročné technické vybavení.
Pokud se elektromobil blíží k svému cíli, rozpozná systém podle lokálních senzorů, zda je přidělené parkovací místo obsazeno či nikoli. Je-li volné, zahájí vůz zcela automatický parkovací manévr a přistaví vozidlo přesně nad zařízení pro indukční nabíjení. Po ukončení nabíjecího procesu opustí vozidlo automaticky nabíjecí stanoviště a uvolní nabíjecí stanici pro další elektromobily. Pokud se řidič vrátí do parkovací budovy, přivolá si vozidlo do výchozího místa jízdy prostřednictvím aplikace V-Charge. Řidič tak vůbec nemusí vstupovat na parkoviště nebo do parkovací budovy.
Vedoucí roli v mezinárodním výzkumném konsorciu zastává švýcarská polytechnická vysoká škola v Curychu (ETH), která má na starosti vizuální lokalizaci, plánování pohybu a řízení vozidla (oblast „Autonomous Systems Lab“), jakož i kalibraci kamer, 3D rekonstrukci z kamerových obrazů a rozpoznávání překážek (oblast „Computer Vision and Geometry Lab“). Technická univerzita v Braunschweigu zpracovává problematiku správy parkovacích míst a komunikace mezi vozidly a technickým okolím („V2I“ – Vehicle-to-Infrastructure“), společnost Robert Bosch GmbH přispívá svým know-how v oblasti senzorového snímání, univerzita v Parmě se věnuje oblasti rozpoznávání objektů a Oxfordská univerzita sestavování detailních navigačních map parkovacích ploch (semantic mapping concept). Volkswagen, jako šestý partner v konsorciu, dodává technické vybavení, bezpečnostní a řídicí moduly, jakož i systémy pro statické snímání okolí, rozpoznávání objektů a automatizované parkování.
Zkušební prototyp disponuje sítí technických smyslových orgánů
Technické předpoklady jsou ponejvíce splněny. V počáteční fázi tak bylo možné použít senzorovou a kamerovou techniku, která se již dnes nalézá v sériově vyráběných vozech. Zkušební prototyp V-Charge, který vychází z modelu Volkswagen eGolf1, je za účelem automatizované jízdy vybaven hustou sítí technických prostředků pro vnímání okolí. Bezpečné snímání a rozpoznávání okolí vozidla zajišťují čtyři širokoúhlé kamery a dvě 3D kamery, dvanáct ultrazvukových senzorů, digitální mapové podklady a tzv. technologie „Car2X“ pro komunikaci vozidla s infrastrukturou a dalšími objekty. Rozsah povinností technických „smyslových orgánů“ je komplexní a mimořádně rozmanitý, ať se jedná o identifikaci chodců, vozidel a překážek, rozpoznávání a zjišťování rozměrů parkovacích míst nebo vytváření celkového obrazu z proudu dat v reálném čase.
V-Charge je již dnes funkční, jak dokládají průběžné testy v rámci výzkumného projektu. Lokalizace uvnitř budov, nezávislá na GPS, určování rozměrů parkovacího místa s přesností na centimetry a rozpoznávání okolí v rozsahu 360° fungují stejně spolehlivě jako reakce na chodce a vozidla nebo zohledňování provozu v podélném i příčném směru.
Volkswagen Touareg s označením „Stanley“ zahájil cestu k autonomní jízdě již v roce 2005
Volkswagen se již mnoho let snaží usilovným výzkumem realizovat vizi autonomní jízdy. V roce 2005 zvítězil v soutěži „Grand Challenge“ pro robotizovaná vozidla Touareg s označením „Stanley“, který byl přestavěn na autonomně jezdící laboratoř ve spolupráci s kalifornskou Stanfordovou univerzitou a výzkumnou laboratoří Volkswagen Electronics Research Laboratory (USA). Dalším vývojovým stupněm byl v roce 2007 Passat „Junior“, který si již tehdy klestil bez řidiče cestu velkoměstskou džunglí, a to tak úspěšně, že v soutěži „Urban Challenge“ pro automatizovaná vozidla obsadil druhé místo.
V témže roce demonstrovaly své automatizované schopnosti další dva výzkumné vozy Passat s pracovními označeními „PAUL“ a „iCar“. Zatímco první z nich dokázal díky inteligentnímu parkovacímu asistentovi zajet bez jakéhokoli přispění řidiče (PAUL = „Parkt Automatisch Und Lenkt“ – parkuje automaticky a řídí) na příčné parkovací místo, usnadnil „inteligent Car“, inteligentní vůz, řidiči řízení v popojíždějící koloně nebo při monotónní jízdě na dlouhé vzdálenosti automatizovaným udržováním bezpečného odstupu od vozidla vpředu a brzděním.
V roce 2011 byl jako ideální vozidlo pro doručovací služby představen malý užitkový vůz „eT – follow me!“. Zatímco řidič jde například v ulici od domu k domu a doručuje dopisy, „eT“ s ostatními zásilkami jej následuje s tichým elektrickým pohonem jako dobře vychovaný pes (funkce „FollowMe“) – nebo poslušně čeká na svém místě, než bude elektronicky přivolán povelem „ComeToMe“.
Rovněž v roce 2011 vstoupil na jeviště automatizované jízdy výzkumný a podpůrný projekt Evropské komise „HAVE-IT“ (Highly Automated Vehicles for Intelligent Transport – vysoce automatizovaná vozidla pro inteligentní dopravu), k němuž přispěla i společnost Volkswagen AG. Inženýři z Wolfsburgu vyvinuli pro model Passat Variant „dočasného autopilota“, který v závislosti na jízdní situaci, okolí a stavu řidiče a systému zajistil nejvyšší možný stupeň automatizace při jízdě na dálnici a silnicích podobných dálnicím.





